Here are the assignments for the Robotics Specialization: Computational Motion Planning offered by UPenn on Coursera.
This is the second course in the robotics specialization. Throughout this course, we have gained knowledge on different techniques for planning robot motions. These include graph-based methods, randomized planners, and artificial potential fields.
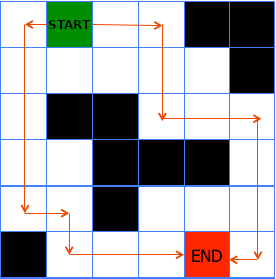
Graph-based Methods Graph-based methods tackle the challenge of planning routes for robots in environments with discrete positions, such as grids. To address this problem, we can represent such scenarios as graphs, where nodes signify grid locations, and edges indicate the routes between neighboring grid cells. In this course, we learned and implemented two graph-based algorithms, Dijkstra and the A-Star algorithm.
...